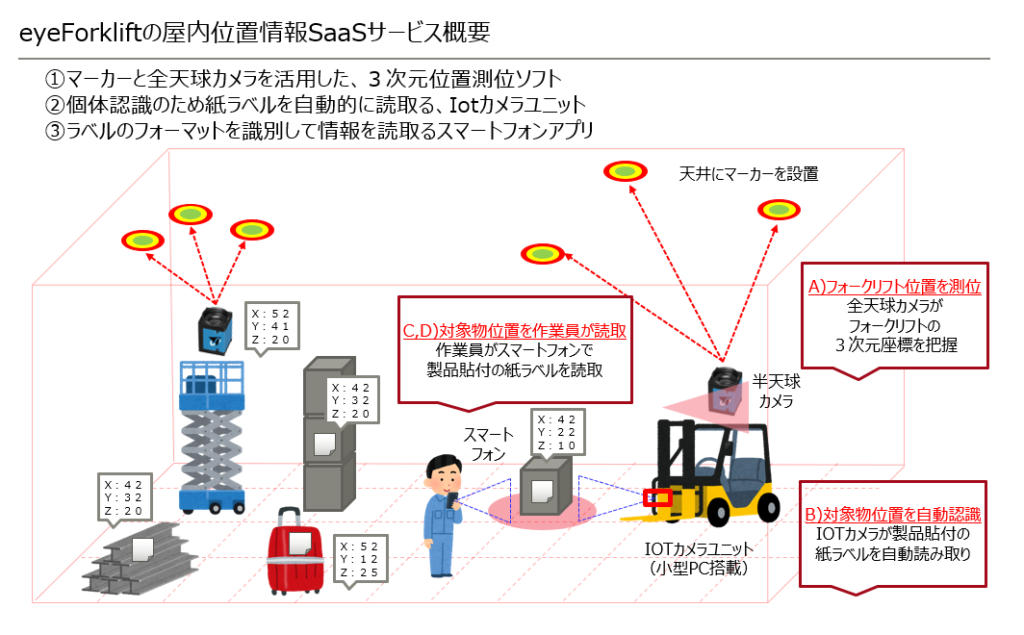
当社のサービスは、フォークリフトが製品を移動させるときに何をどこに移動させたのか、自動的に把握できる機能を提供します。実現させるために、次の2つの技術を組み合わせています。(特許取得済み)
※出願番号 2018-163505
公開番号 2020-033173 管理システム、位置算出プログラム、位置算出方法及び管理装置
- 製品の固体認識
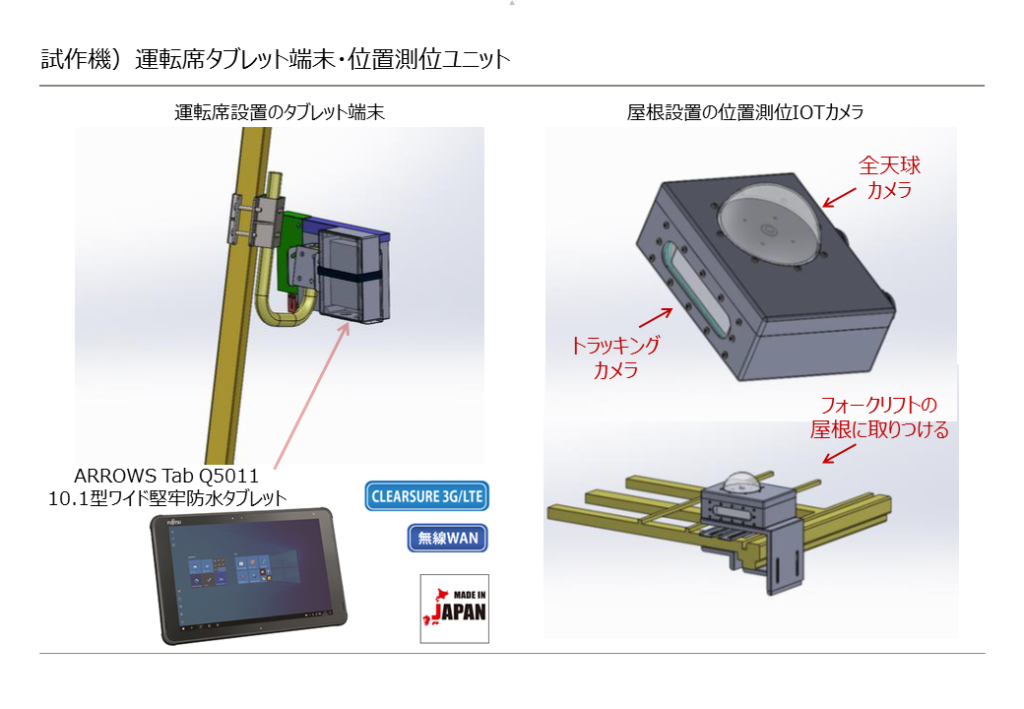
フォークリフトが製品を掴んだ時に、フォークリフトの爪先に取り付けた、IoTカメラユニットが紙ラベルの印刷画像から自動的に情報を識別致します。 - フォークリフトの位置座標把握
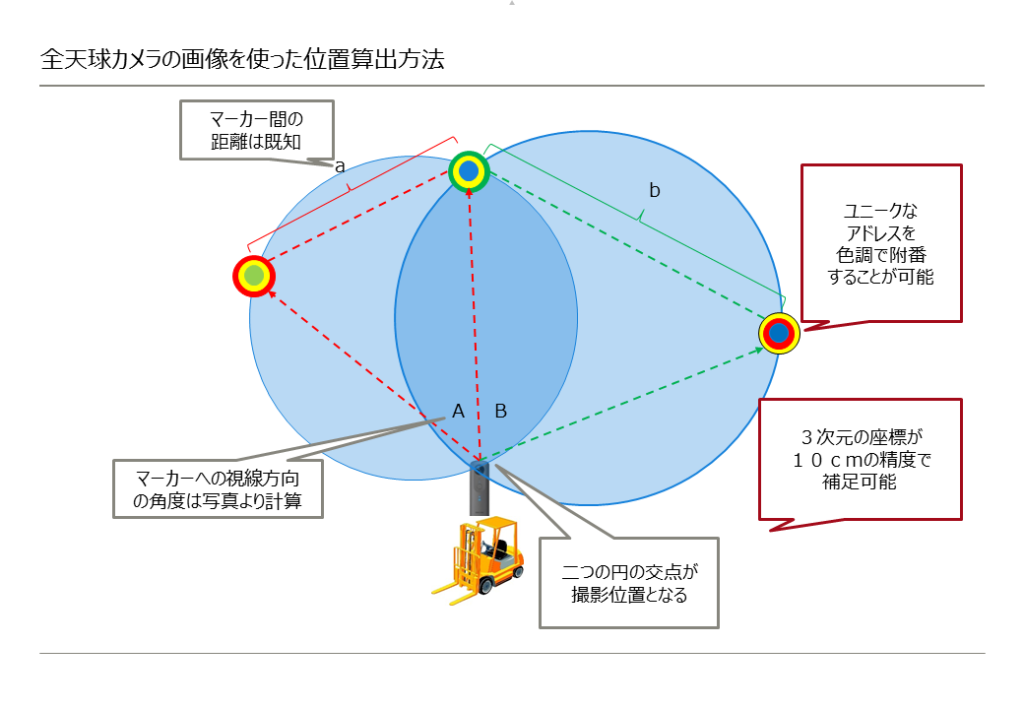
人工衛星→GPSの原理を応用して、天井に貼り付けた紙に印刷したマーカーを全天球カメラが捕捉して、3次元位置座標を測位するという富士通株式会社の技術を採用しております。
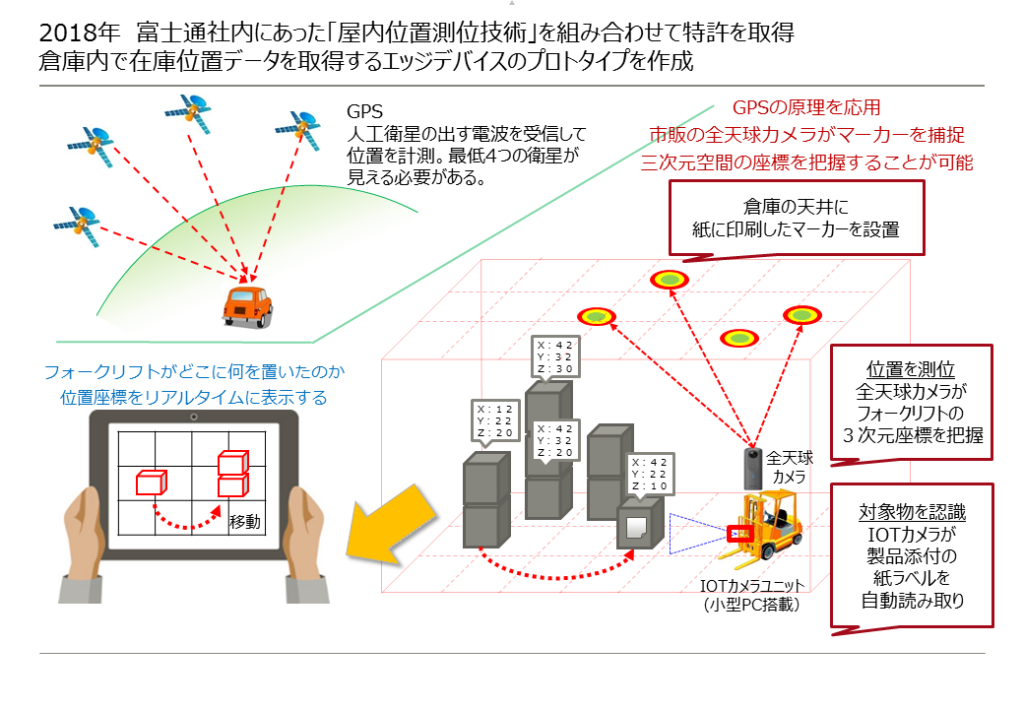
カーナビゲーションシステムに搭載されているGPSは、人工衛星から発信された電波を補足して、自動車の位置を把握しています。人工衛星は移動しているため、4つ(縦・横・高さ・時間)の衛星の電波が必要になります。その原理を応用して、電波の代わりに、マーカーの画像を人工衛星に見立てて全天球カメラの位置座標を算出します。静止しているため3つ(縦・横・高さ)のマーカーが写り込めれば、全天球カメラの3次元位置座標を算出することが可能です。

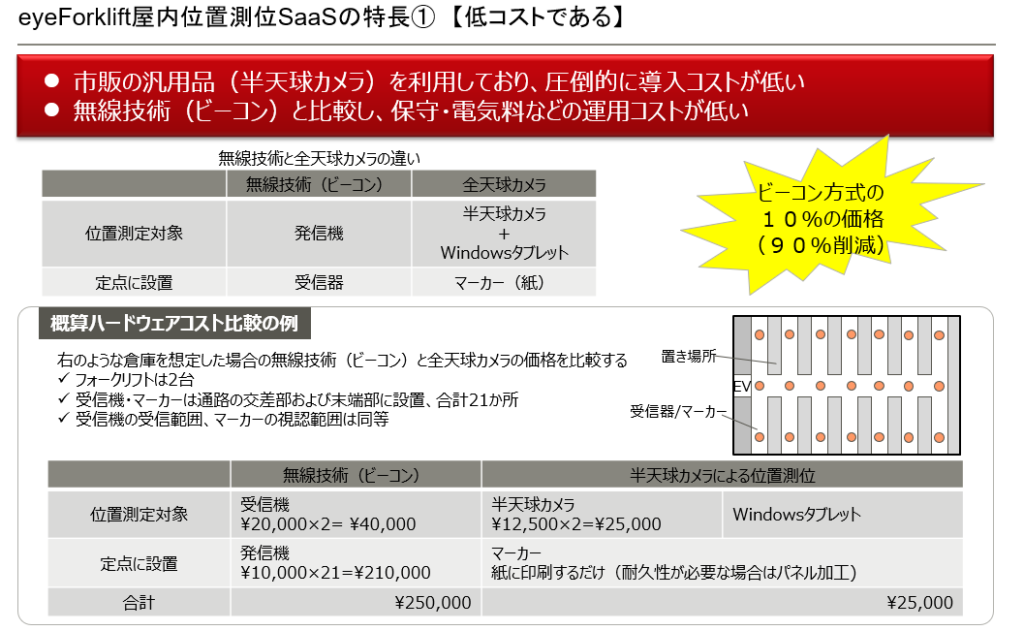
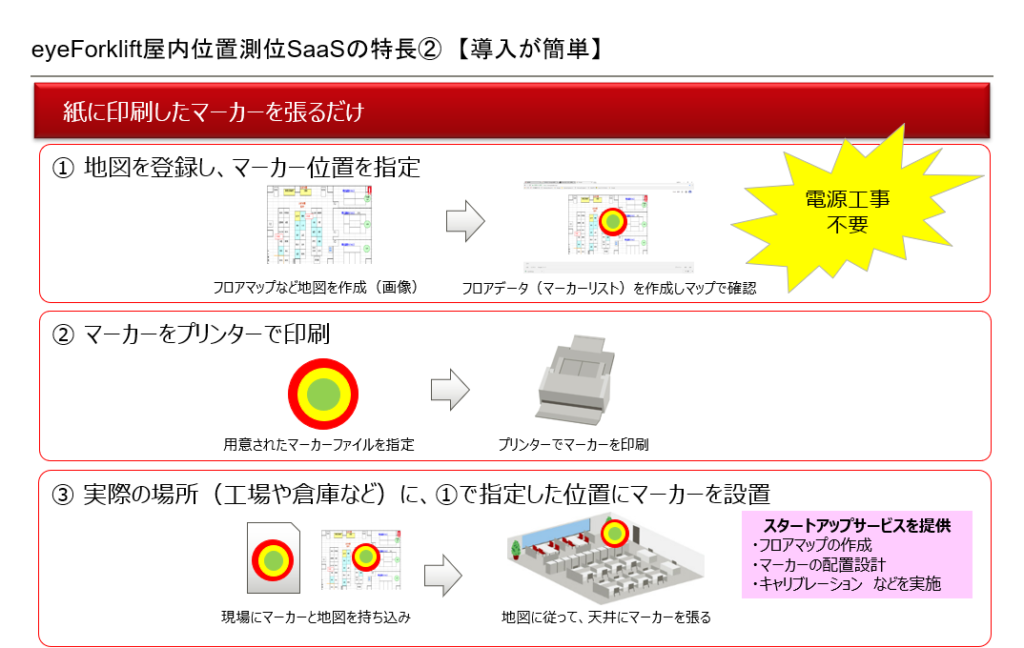
天井に、マーカーが印刷された紙を貼り付けると、その画像を識別して自分自身の位置座標を算出します。電波を発信するビーコンを使用することで同じことが可能ですが、高所に設置すると数年おきに内蔵電池を交換する必要がでてきます。当社の手法は紙であるから非常に安価であり、電池交換の必要もありません。